系统概述
基于 PLC 控制的飞轮储能 UPS 系统,采用模块化设计,保障关键设备不间断供电
供电挑战
数据中心、医疗行业、精密制造等关键领域,毫秒级电力中断都将引发重大经济损失,甚至安全事故。
传统UPS局限
化学电池储能虽技术成熟,但循环寿命短、衰减快、环境污染大,高频短时断电场景下短板明显。
飞轮储能优势
物理储能,响应速度快、循环寿命长、能量转换效率高,全生命周期零化学污染,满足双碳目标。
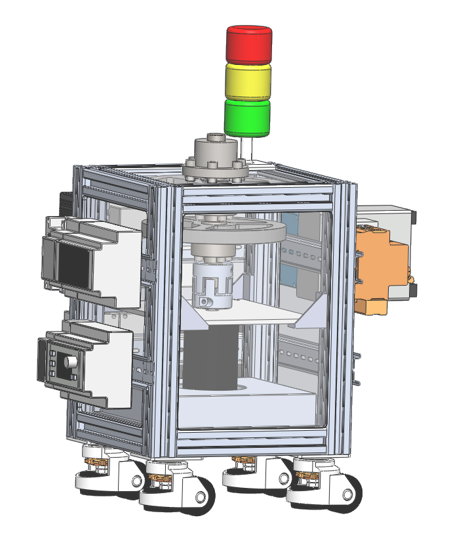
硬件实物照片
系统电控组件拓扑结构
电源结构
- 主电源 (24V DC)
- 副电源 (备用)
- 电源自动切换开关
- 输入电能表
- 输出稳压电源
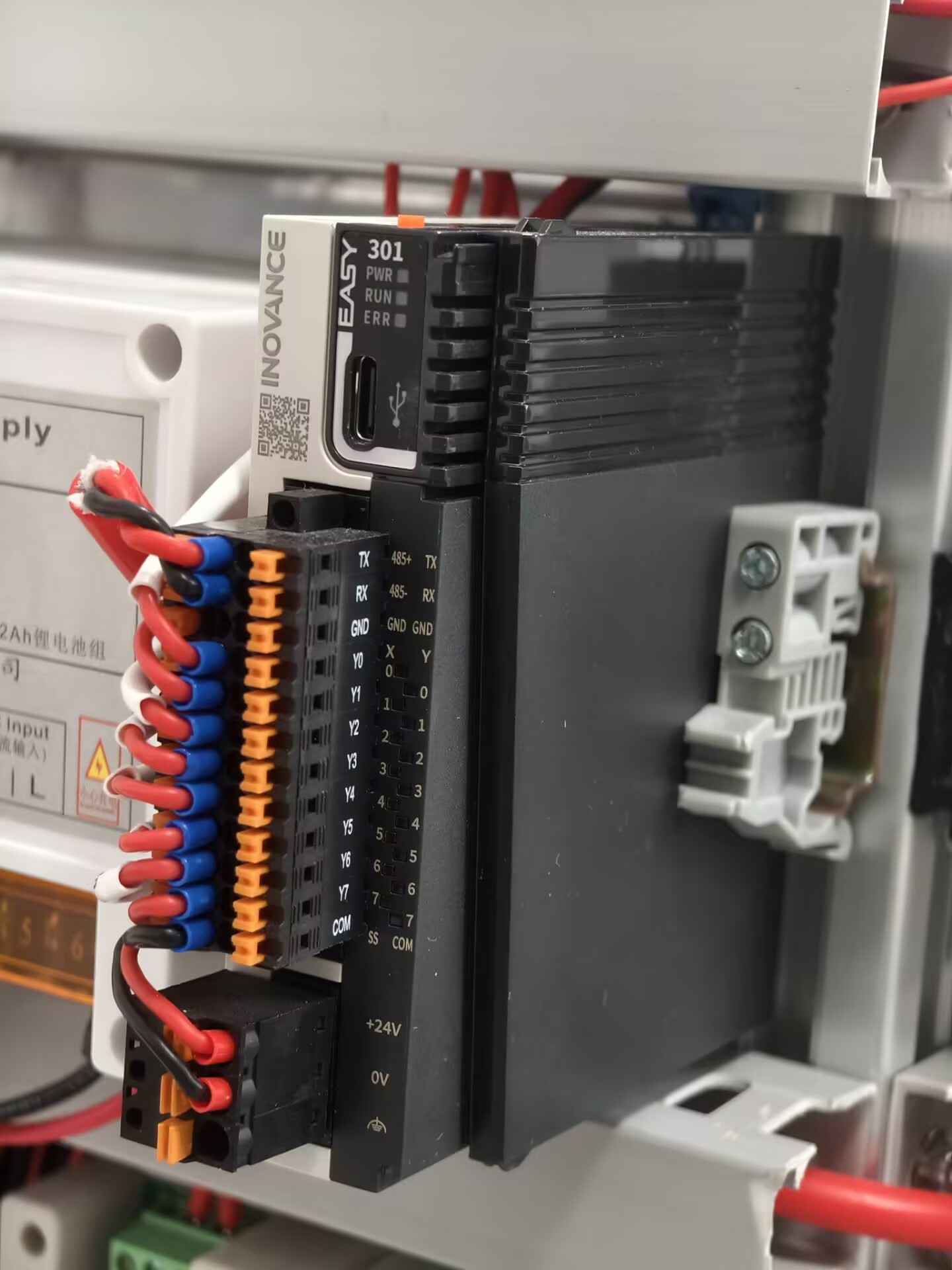
控制结构
- PLC (Easy-301)
- 状态切换继电器
- 三色状态灯
- 数码管显示器
- 遥控示教器
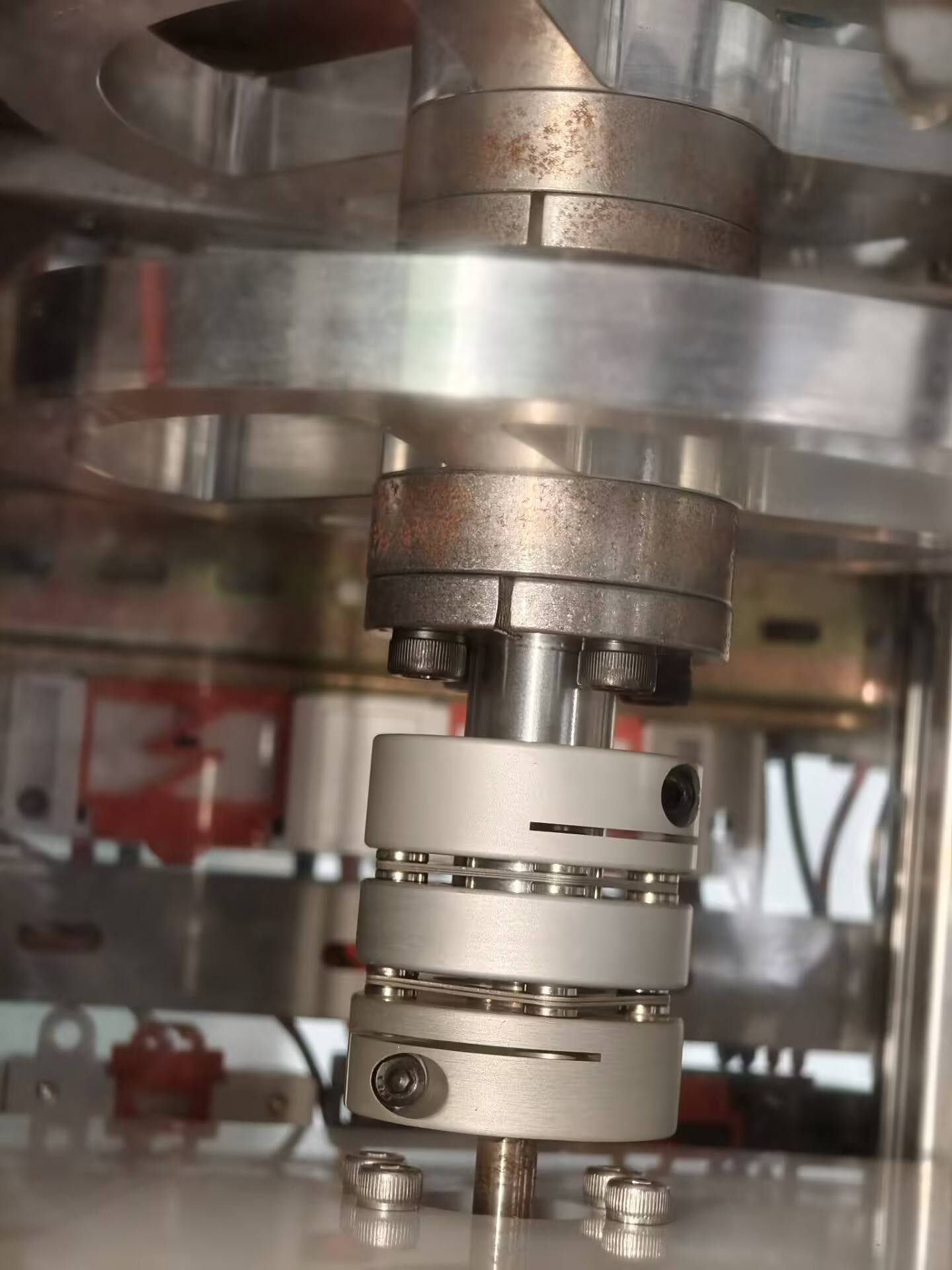
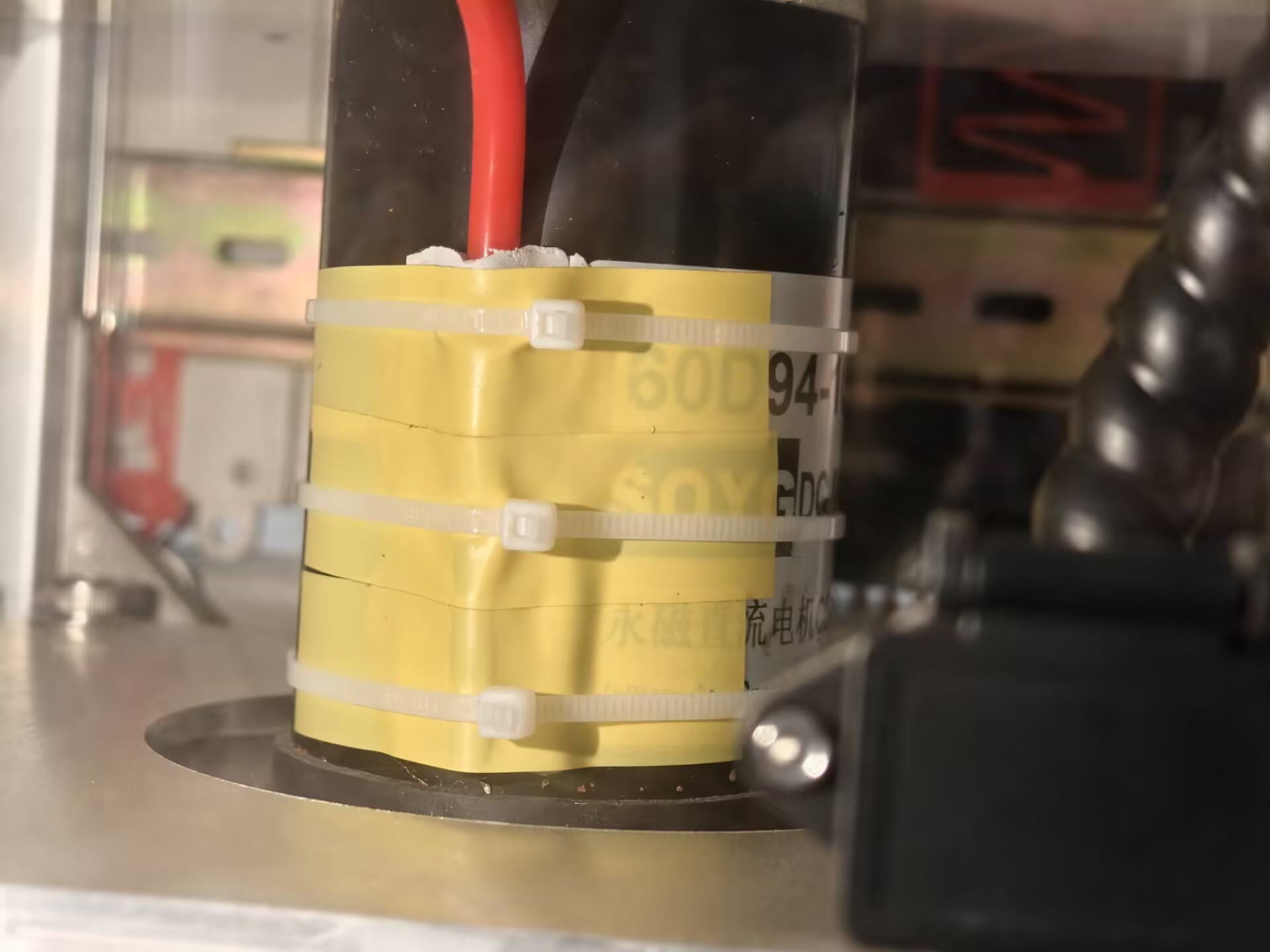
储能结构
- 飞轮电机 (60D94)
- 电机驱动器 (HY-20A-2)
- 储能飞轮 × 2
- 飞轮主轴 + 胀紧套
传感器结构
- 霍尔转速传感器
- DS18B20温度传感器
- 实时参数监测
- 异常报警触发
"充能-储能-输出" 循环工作流程
充能模式
绿灯闪烁
主电源供电 · 飞轮加速至设定转速 · 电能→动能
储能模式
绿灯常亮
待机保持 · 转速监测 · 数据轮显 · 转速过低自动充能
输出模式
黄灯闪烁
主电源异常 · 飞轮放电 · 动能→电能 · 保障负载供电